|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Reglarea automata a debitului
|
|
Un S.R.A. pentru debit are schema bloc din fig.1.1. Printr-o conducta de lungime L si diametru D curge un fluid cu debitul Q. Conducta e delimitata de elementul de executie EE si traductorul de debit TD. Pe baza informației primite de la traductorul de debit și a valorii prescrise Q0, dispozitivul de reglare a debitului DRD da comanda spre elementul de execuție EE (un servoventil) pentru modificarea corespunzatoare a debitului Q.

Fig.1.1. S.R.A. pentru debit
Pentru reglarea debitului se determina modelul matematic al conductei tehnologice prin care curge un fluid. Se presupune curgerea prin conducta a unui lichid incompresibil (in cazul lichidului compresibil calculul fiind similar prin corectia cu un coeficient de compresibilitate) si se foloseste ecuația de conservare a impulsului care actioneaza in sistem pentru doua cazuri distincte, intalnite mai frecvent in practica :
conducte
scurte cu ![]() ;
;
conducte
lungi cu ![]() .
.
1.1.1. Modelul matematic al unei conducte scurte
Tronsonul de conducta se echivaleaza cu o rezistenta hidraulica pentru care este valabila relatia cunoscuta
![]()
unde : Q - debitul de fluid ce trece prin conducta (Qo in regimul stationar);
ΔP - caderea de presiune pe conducta (ΔPo in regimul stationar);
- coeficient de debit;
S - sectiunea de trecere a fluidului;
- densitatea fluidului.
Pentru regim stationar de curgere se echilibreaza fortele care actioneaza
![]()
unde : Fa - forta activa de apasare asupra lichidului din conducta
![]()
Fr - forta de reactiune pe tronsonul de conducta
![]()
Rezulta
![]()
In regim dinamic, diferenta dintre cele doua forte este compensata de viteza de variatie in timp a impulsului din sistem
![]()
unde M este masa de fluid din conducta si v este viteza de deplasare a fluidului.
Se obtine
![]()
Marimile care depind de timp se obtin daca se dau variatii arbitrare peste valorile de regim staționar
 (1.8)
(1.8)
Din (1.7) si (1.8) se obtine
![]()
și, extragand expresia regimului stationar si neglijand termenul patratic Q2(t), rezulta
![]()
Prin normare la valorile de regim stationar avem marimea reglata
![]()
si marimea de executie
![]()
rezultand modelul matematic temporal
![]() (1.13)
(1.13)
unde V0 este volumul de fluid in regim stationar in conducta.
Prin aplicarea transformatei
![]() (1.14)
(1.14)
unde : Tpa - constanta de intarziere a conductei scurte
![]() (1.15)
(1.15)
kp - coeficientul de transfer al conductei kp = 1/2.
Se obține astfel functia de transfer a conductei scurte
![]()
din care se observa ca o conducta scurta este un element aperiodic de ordinul intai.
1.1.2. Modelul matematic al unei conducte lungi
In acest caz se presupune ca forta de reactiune este forta de frecare a fluidului cu peretii conductei, debitul depinzand esential de lungimea L a conductei
![]() (1.17)
(1.17)
unde k este coeficient de frecare al fluidului cu conducta.
Echilibrand fortele, pentru regimul stationar al procesului de curgere avem
![]() (1.18)
(1.18)
Pentru regimul dinamic se poate scrie
![]() (1.19)
(1.19)
Marimile variabile in timp au semnificatiile din (1.8) si atunci (1.19) devine
![]() (1.20)
(1.20)
din care extragand expresia regimului stationar si neglijand termenul patratic ΔQ2(t)
![]() (1.21)
(1.21)
Prin normare la valorile de regim stationar, ca in cazul precedent, se obtine modelul matematic temporal
![]() (1.22)
(1.22)
Prin aplicarea transformatei
![]() (1.23)
(1.23)
unde : Tpb
-
![]() (1.24)
(1.24)
kp - coeficientul de transfer al conductei kp = 1/2.
Se obține astfel functia de transfer a conductei lungi
![]() (1.25)
(1.25)
rezultand ca si conducta lunga este un element aperiodic de ordinul intai.
1.1.3. Proiectarea S.R.A. pentru debit
Consideram SRA din fig.1.1 la care cunoaștem functia de transfer a partii fixe
![]() (1.26)
(1.26)
rezultata prin conectarea in serie dintre :
- traductorul de masura, considerat element proportional
![]()
- elementul de execuție, aproximat de un element aperiodic de ordinul intai
 (1.28)
(1.28)
- procesul reglat, reprezentat de conducta tehnologica prin care circula debitul de fluid, cu functia de transfer determinata anterior :
![]() (1.29)
(1.29)
Pentru automatizare se recomanda un regulator PI care asigura performante superioare in regim stationar. Intucat sistemele pentru reglarea debitului au inertii mici, frecventa cu care sunt scoase din regimul stationar este relativ mare, astfel ca este necesar un studiu asupra stabilitatii sistemului, din care vor rezulta concluzii utile proiectarii. Pentru analiza stabilitatii sistemului vom utiliza criteriul Nyquist-Neumark.
Functia de transfer a sistemului in circuit deschis este
![]() (1.30)
(1.30)
de unde, aplicand transformata Fourier, se obtine
![]() (1.31)
(1.31)
care poate fi descompusa in parte reala si parte imaginara
![]() (1.32)
(1.32)
care da informatii despre locul de transfer a sistemului deshis.
Conditia ![]() ne da pulsatia
la care locul de transfer taie axa imaginara
ne da pulsatia
la care locul de transfer taie axa imaginara
![]() (1.33)
(1.33)
si conditia
![]() ne da pulsatia
la care locul de transfer taie axa reala
ne da pulsatia
la care locul de transfer taie axa reala
![]() (1.34)
(1.34)
Deoarece functia de transfer a sistemului deschis nu are poli in
semiplanul drept, sistemul inchis e stabil daca locul de transfer al
sistemului deschis nu inconjoara punctul critic de coordonate ![]() . In fig.1.2 sunt reprezentate cazurile :
. In fig.1.2 sunt reprezentate cazurile :
locul de transfer a sistemului deschis nu taie axa reala dar taie axa imaginara (cazul a), deci nu exista pulsatie ωR dar exista pulsatie ωI;
locul de transfer a sistemului deschis nu taie axele reala si imaginara (cazul b), deci nu exista pulsatii ωR si ωI;
locul de transfer a sistemului deschis taie axa reala dar nu taie axa imaginara (cazul c), exista pulsatie ωR si nu exista pulsatie ωI.
Fig.1.2. Locul de transfer a sistemului deschis
Primul caz e asigurat pentru orice valoare a factorului de amplificare kR daca este indeplinita una din urmatoarele doua conditii
 (1.35)
(1.35)
Pentru a doua varianta este indeplinita conditia
![]()
cu restrictia de asigurare a stabilitatii (pentru constanta de timp Ti din (1.36) si cr
![]()
Asadar, pentru ca sistemul sa fie stabil, sunt necesare conditii restrictive impuse parametrilor regulatorului (kR si Ti). Se impune ca in proiectarea regulatorului sa se utilizeze o metoda bazata pe un criteriu integral in care sa se poata tine seama de restrictiile anterioare (1.36) și (1.37). Parametrii optimi de acordare ai regulatorului se determina prin rezolvarea problemei
 (1.38)
(1.38)
sau a problemei
 (1.39)
(1.39)
unde : ε(t) - eroarea dinamica a sistemului;
- coeficient de ponderare a derivatei (t) fata de (t).
Criteriul integral J admite o exprimare directa, astfel incat problemele (1.38) sau (1.39) se reformuleaza astfel
 (1.40)
(1.40)
respectiv
 (1.41)
(1.41)
Acestea sunt probleme de optimizare parametrica ce pot fi rezolvate prin metodele numerice, rezultand solutia (kR*,Ti*).
Metoda propusa e avantajoasa si pentru ca poate lua in considerare si restrictii de ordin constructiv impuse de regulatorul fizic
![]() (1.42)
(1.42)
1.1.4. Realizarea sistemelor pentru reglarea debitului
Sistemele pentru reglarea debitului sunt realizate in structuri simple de reglare dupa eroare ca in fig.1.1. O astfel de structura este folosita de sine statator pentru mentinerea unui debit la o valoare prescrisa, sau ca bucla secundara intr-o structura de reglare evoluata de cascada a debitului cu nivelul, temperatura, concentratia etc.
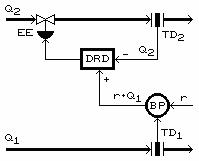
Fig.1.3. SRA de debit cu menținerea constanta unui raport dat intre doua debite
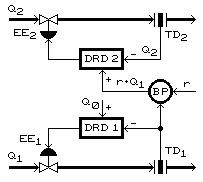
Fig.1.4. SRA de debit cu menținerea constanta unui raport dat intre doua debite și stabilizarea celuilalt debit
In unele aplicatii industriale se solicita mentinerea unui raport dat r intre doua debite Q1 si Q2. Aceasta cerinta este asigurata prin SRA avand schema bloc din fig.1.3, in care apare blocul de raport sau blocul proportional BP, care primeste la intrare o marime proportionala cu valoarea debitului Q1 si la iesire genereaza marimea r·Q1 care devine marime prescrisa pentru sistemul de reglare al debitului Q2. In regimul de functionare al acestui sistem este satisfacuta relatia
![]() (1.43)
(1.43)
In fig.1.4 se prezinta un sistem care realizeaza, pe langa mentinerea unui raport dat r intre doua debite Q1 si Q2, si stabilizarea debitului Q1.
Copyright © 2025 - Toate drepturile rezervate
| Instalatii | |||
|
|||
|
| |||
|
| |||
|
|
|||